影像课堂|小动物三维光学活体成像第三篇:三维体表重建
来源:
|
作者:锐视科技
|
发布时间: 2026-03-10
|
450 次浏览
|
🔊 点击朗读正文
❚❚
▶
|
分享到:
在上一篇文章中,我们系统阐述了三维光学活体成像核心流程的第一步——信号激发与采集。在这一阶段,首先需要从多个角度对小动物体表进行全面扫描,以获取高精度的结构信息。在本文中,我们将展示如何利用这些多角度采集的数据进行三维体表重建,从而构建高精度的三维几何模型。
在上一篇文章中,我们系统阐述了三维光学活体成像核心流程的第一步——信号激发与采集。在这一阶段,首先需要从多个角度对小动物体表进行全面扫描,以获取高精度的结构信息。在本文中,我们将展示如何利用这些多角度采集的数据进行三维体表重建,从而构建高精度的三维几何模型。
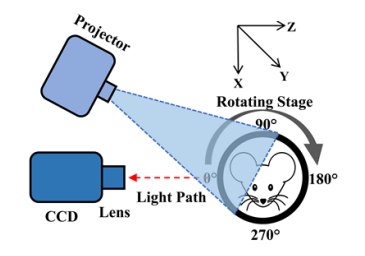
多角度体表信息采集和三维体表重建的流程
采用相位测量轮廓术,由数字光处理投影仪向小动物体表连续投射具有固定相位偏移的正弦条纹图案。条纹投射到小动物体表后,会因体表起伏产生形变,使得不同位置的亮度分布发生变化,这些变化包含了体表三维几何信息。
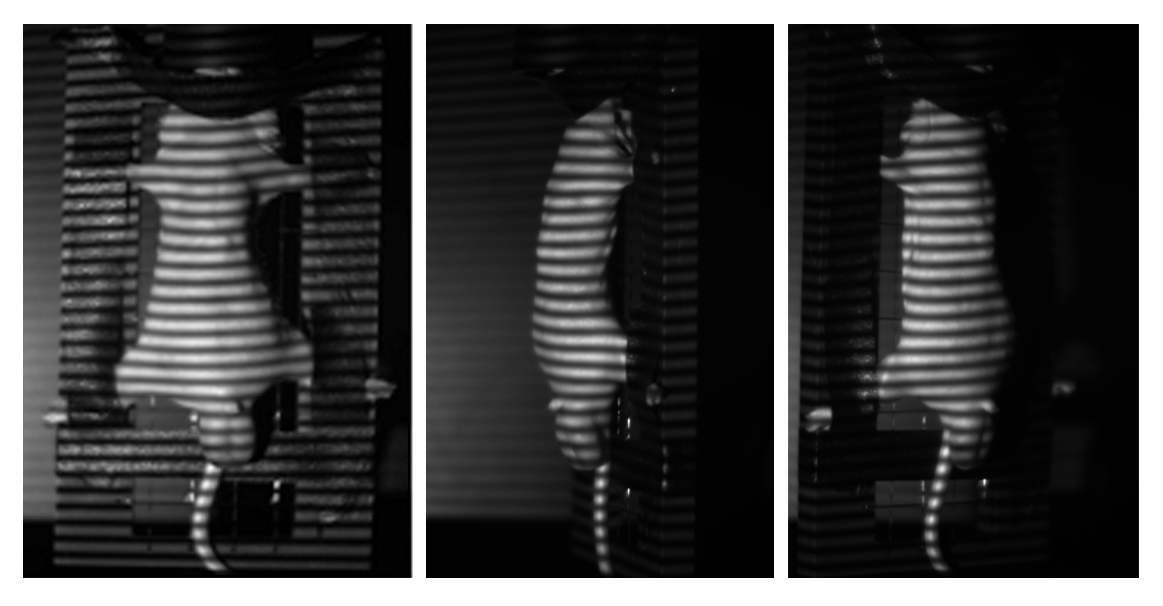
高灵敏度相机同步采集每一组条纹图像,记录每个像素在不同相位条纹下的亮度值,这些数据里“隐藏”着体表的形状信息。
单一视角只能获取局部表面信息,因此需要进行多角度扫描。系统通过旋转动物平台,使相机从多个角度采集体表数据,确保体表信息能够覆盖完整的360°范围。
4. 点云配准与合并
将不同视角获取的局部点云数据进行空间配准与拼接,融合至统一的三维坐标系中,构建完整的三维点云模型。在拼接过程中,通过对各视角点云进行刚性配准与对齐,消除重叠区域带来的误差,并对由于遮挡产生的缺失区域采用插值算法进行自动补全,最终生成覆盖完整360°体表轮廓的点云数据。采用三次多项式拟合方法对点云进行平滑优化,去除离群点和噪声数据,获得高质量点云;然后通过三角化算法(Greedy Projection Triangulation)将离散点云转换封闭的三维表面网格模型(watertight surface mesh),该模型能够准确描述小动物体表轮廓,并可作为后续光学断层重建(如BLT)的边界条件。
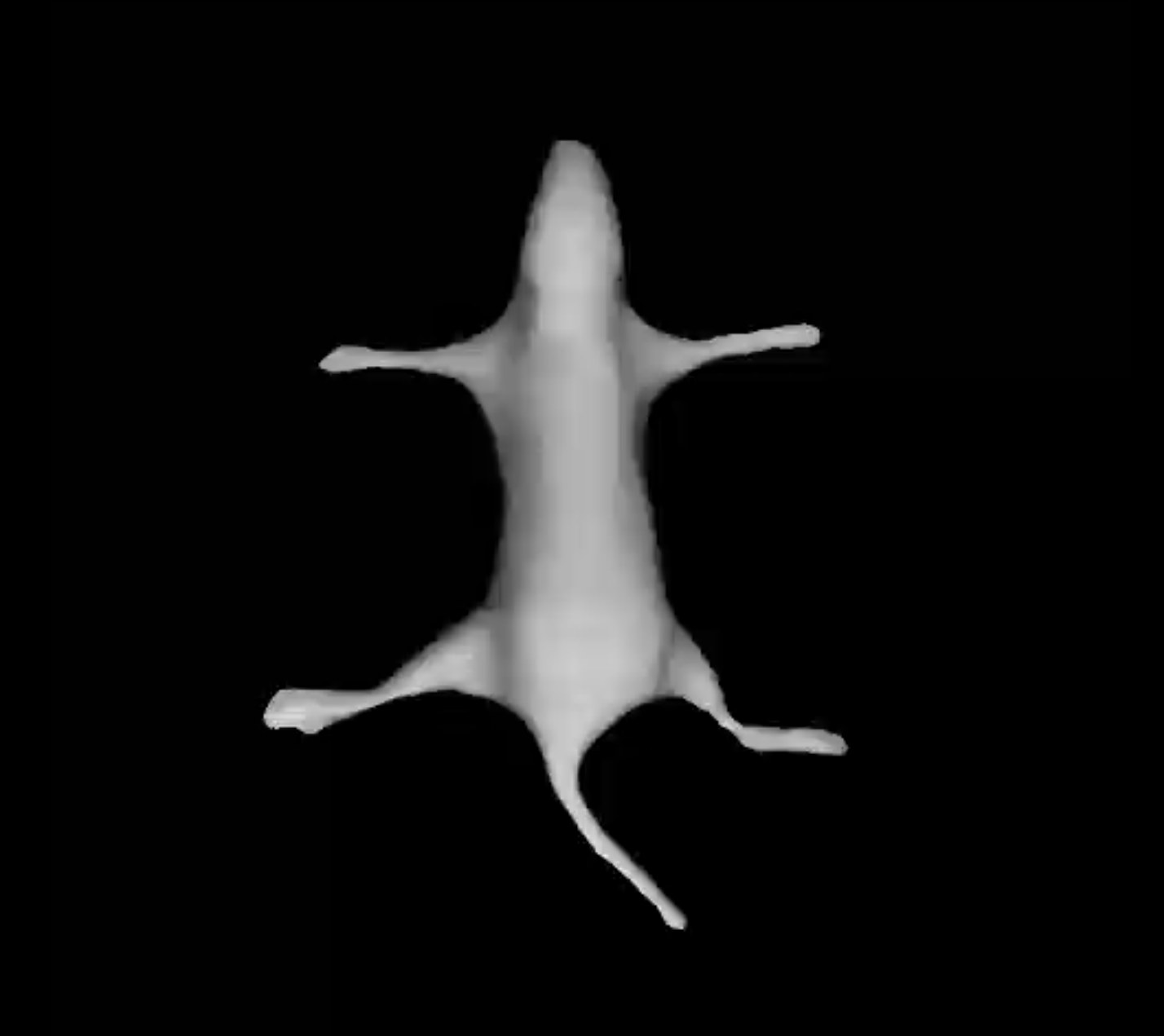
最终,我们得到一个完整且高精度的小动物三维体表模型,用于分析体内光信号的空间分布。基于结构光方法重建的体表轮廓与CT获取的结构轮廓具有良好的一致性,可提供可靠的几何边界信息。该三维模型不仅为后续光学信号的三维定位与重建提供了准确的边界约束和基础框架,也为体内光学信号空间分布的定量分析奠定了坚实基础,从而确保整个成像与重建流程的准确性与可靠性。
▲全维度光学活体成像系统(型号:IMAGING 200pro)



